点击浏览各干簧管厂家产品详细介绍 ALEPH OKI celda MKA LUGANA PIC RZMKP SRC MEDER CP CLARE REED RELAY COP COTO HAMLIN MEDER MDI水银开关继电器/半导体继电器/军用 ALEPH OKI celda MKA LUGANA PIC RZMKP SRC MEDER CP CLARE REED RELAY COP COTO HAMLIN MEDER MDI水银开关继电器/半导体继电器/军用
电子罗盘,电子指南针,数字罗盘,数字指南针
|
|
电子罗盘,电子指南针,数字式指南针:提供标准系列产品,同时可以根据客户要求进行具体的定制。能应用于地质,卫星GPS系统,风水,越野车,航海,实验仪器等。性能价格比很高。对用户而言,是比较理想的选择。同时,低价位机器人数字罗盘非常适用机器人,玩具飞机等场合。同时,我公司还提供系列磁阻形式的电子罗盘和磁通门形式的电子罗盘的定制服务。我公司可根据客户的要求,定制各种形式输出的数字罗盘,数字指南针,数字磁罗经等系列。
|

|
|
测斜仪:由电子罗盘和倾斜仪组合而成,通过的数学模型和仔细的检测校核,工作温度-20到71度。直接数字输出,也可以定制显示系统;高精度A/D转换。连续输出管道倾斜方向和地磁北极夹角。也可以根据用户要求进行倾斜角的随时记录。和传统照相式测斜仪相比有独到的优势。该仪器设备可用于物探仪器,地质,岩土,石油,矿山,管道,测斜导管,铁路、港口、水利、高层建筑,墙洞,矿井、隧道、船坞、抗滑桩和板桩,煤矿等场合。相比美国,欧洲产品,有非常大的价格优势。
|
|
型号
|
说明
|
|
LP3200
|
平面电子罗盘,精度1度,OEM
|
|
LP3300-U
|
三轴电子罗盘,+/-60度倾角补偿,精度1度,OEM
|
|
LP3300
|
三轴电子罗盘,+/-60度倾角补偿,分辨率0.1度精度1度
|
|
LP3500
|
三轴电子罗盘,更强更好的软、硬磁场较核
|
|
MT测斜仪
|
+/-70度倾角补偿,输出倾斜方向,精度1度
|
|
HMR3100
|
平面电子罗盘,精度5度,OEM
|
|
HMR3200
|
平面电子罗盘,精度1度,OEM
|
|
HMR3300
|
三轴电子罗盘,+/-60度倾角补偿,精度1度,OEM
|
|
|

|

|

|
|
HMR2003三轴磁力仪
|

|
详细资料
|
HMR2300r是一个圆形智能数字磁力计,符合MIL(军用)-标准-810E的要求数字输出: RS232 或RS485,微控制器型,配有置位/复位和偏置校准电路,测量范围±2 高斯, 1% 精度, 70 微高斯分辨率.单电源操作6.4-15V,(<35mA)。
应用包括: 指南、导航和方位的航向传感.用于航空和海运AHRS (空间方位角和参照系统), 和GPS的后备系统,无人驾驶车、遥控操作车、无人飞机,卫星的导航和姿态控制,航空电子技术和航海、替换磁通门。
|
|
|
|
|
|
|
|
|
HMR3200双轴电子罗盘
|
|
详细资料
|
双轴数字罗盘HMR3200体积小,分辨率0.1°精度1°重复性0.5°,直接与微控制器连接,UART 串行输出,功率低: 6-15V 电源,可用电池操作,可水平或垂直安装,硬铁校准可消除大型铁质物体造成的磁偏置。
应用包括:电子罗盘定向,航海导航和无人驾驶飞行器导航,卫星天线定位,GPS系统死区推估,姿态控制,激光测距仪,平台水平度。。
|
|
|
|
|
|
|
|
HMR3300三轴电子罗盘
|
|
详细资料
|
三轴斜率补偿数字罗盘HMR3300,小巧(25mm*34mm)(1°-3°的航向精度,0.1°的航向分辨率,0.5°的航向可重复性)可靠,有倾斜补偿和硬铁校准,USART 串行输出直接连接到控制计算机。
应用包括:罗盘航向传感器,配有卓越的套件,可用于航海导航和无人驾驶飞行器导航,GPS死区推估,姿态参照系统, 卫星天线定位,平台调平,激光测距仪。
|
|
|
|
|
|
|
|
HMR3400电子罗盘模块
|
|
详细资料
|
|
霍尼韦尔HMR3400是设计供航行和精密使用的一个数字化指南针解决办法,在传感器的基础上提供可靠的倾角补偿的电子指南针的一台备忘录加速表。HMR3400透过有磁的传感器解决办法保持产品卓越和性能,这些非常可靠。
|
|
|
|
|
|
HMR3500 电子罗盘模块
|
|
详细资料
|
HMR3500是款真正意义上的三维数字罗盘模块,可以任意安装使用,无论倾斜多少都可以。航向精度是1°,分辨率0.1°,重复精度0.5°。
主要用于:无人车辆驾驶、天线阵、武器瞄准、陆地和海洋导航、激光测距、运动轨迹、磁异常检测、摄像头控制等。
|
|
|
|
|
|
|
|
|
磁传感模块HMR4001
|
|
详细资料
|
HMR4001是利用Honeywell的HMC1512磁传感芯片制成的高精度、低成本、单轴传感器模块。模拟输出,6~20VDC宽电压供电,精度0.02mm,重复精度0.05mm,工作温度-40℃~+85℃,尺寸小,利于集成。
应用包括 :线性位移测量、位置测量、角位移测量、接近开关
|
|
|
|
|
|
|
|
HMR4007线性位置传感器模块
|
|
详细资料
|
提供的HMR4007是一种高分辨率的电子线性位置传感器模块,可用于测量大范围的线性位置。其特点包括高灵敏度,上电即知位置,在传感器与磁铁之间能允许有较大的空间,并可采用高灵敏度的低成本的磁铁(如:镍铬合金或陶瓷)。
应用包括 :位移测量、位置测量、替换电位计和分压计、水泵流量控制。
|
|
|
|
|
|
|
|
HMR3300-232demo开发板
|
|
详细资料
|
|
HMR3300体积小,精度高,价格又低。具有很高的使用价值。但HMR3300输出形式为UART,而很多用户更习惯于RS232形式。因此在使用的过程中产生诸多不便,为了更方便的使用HMR3300,特别开发制作了HMR3300-232 demo开发板,由UART转换为RS232接口,尺寸为41*26mm,直流6~15V供电,,并且可以选择HMR3300的供电模式,5V或6~15V。单排自锁插座。成本低,性能可靠,非常方便使用。
|
|
|
|
|
|
TCM2-20/50—三维电子罗盘
|
|
详细资料
|
|
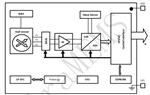
美国PNI公司具有多年生产电子罗盘的经验,其产品在汽车罗盘市场占有优势。TCM2三维电子罗盘是PNI家族中的佼佼者,是PNI公司多项先进技术的结晶,它采用PNI的倾斜传感技术,去掉了传统方式下的机械“万向节”,使整个产品完全电子化,不再有可移动部分,大大地提高了产品的可靠性和适用范围。TCM2内部由三个磁场计、一个两轴高精度倾斜传感器,一个温度补偿计、微处理机和相关接口电路组成,通过内部独有的软件可改正软、硬铁所产生的磁场干扰,使TCM2在任何环境中都能正常使用和工作,可以毫不夸张地说:TCM2三维电子罗盘是罗盘导航应用中的革命。
|
|
|
|
|
|
|
|
|
TCM2.5 三维全固态电子罗盘
|
|
详细资料
|
|
TCM2.5是时下PNI公司初系列产品TCM2的替代品。它可以给用户提供改良精度和性能指标的罗盘航向、倾斜角和磁力计测量值。它与TCM2具有完全一样大小、一样10针RS-232接口连接器和完全与TCM2 ASCII协议兼容等优点。这些特点使得TCM2.5是现有的要求同TCM2系列产品兼容的应用的理想选择。
|
|
|
|
|
|
|
|
TCM2.6 三维全固态电子罗盘
|
|
详细资料
|
|
TCM2.6具有所有TCM2.5现有的功能,但TCM2.6却只有TCM2.5一半的体积和一半的重量,因此TCM2.6被更广泛的应用于日趋小型化设计的系统当中。尤为突出的是,TCM2.6的工作温度范围达到 -40℃到+85℃,储存温度达到-40℃到+125℃。 TCM2.5集成三轴磁场传感单元,两轴倾角传感和方向罗盘于单个模块中。优点包括同现有系统兼容、低功耗、所有条件下强大的信号去噪能力和大的磁场测量范围。
|
|
|
|
|
|
|
|
TCM3 三维全固态电子罗盘
|
|
详细资料
|
|
继美国PNI公司推出了TCM2电子罗盘之后,PNI又推出一系列升级换代产品,其中以TCM3受用户所推崇。TCM3是一款倾斜范围高达±80°,高精度数字输出的罗盘模块。此产品带有硬磁、软磁及倾角补偿,罗盘输出校准后的高精度测量值。TCM3集成拥有PNI技术的三轴磁通门,通过中央处理器实时解算航向,以及使用三轴加速度计对大范围内的倾斜角进行航向补偿,使得在极其恶劣的环境下也能提供准确的航向数据。TCM3体积小、功耗低,在天线稳固、车辆、系统集成等众多领域得到广泛应用。
|
|
|
|
|
|
|
|
PNI电子罗盘模块TCM5
|
|
详细资料
|
|
TCM5是PNI罗盘模块中的终版本,它可以在任何方向上提供的航向信息。这种微型的、简洁的模块提供360度整个旋转范围和完全灵活的应用,允许将其安装固定在多种方向和位置。这些优点使得TCM5是世界上任何地方需要精度性能应用场合的理想选择。
|
|
|
 磁敏元件/磁阻传感器 磁敏元件/磁阻传感器
|
|
|
霍尔元件
|
ATS276,277
|
A3144
|
UGN3503
|
|
|
|
SS400
|
SS490
|
|
|
|
检钞、验钞
|
MRS-F-11
|
MRS-F-21
|
MRS-G-06
|
MRS-H-06
|
|
磁场传感器
|
|
|
集成磁场
|
GMRB6
|
GMRC6
|
ZMY20
|
AD22151
|
|
磁簧开关(干簧管)
|
|
|
日本ALEPH
|
HYR1002
|
HYR1003
|
HYR1532
|
HYR1554
|
|
HYR1555
|
HYR2003-1
|
HYR9001-1
|
|
|
俄罗斯MKA
|
MKA-XXXX
|
MKA-07101
|
MKA-10109
|
MKA-14103
|
|
MKA-16101
|
MKA-20101
|
MKA-50201
|
|
|
日本OKI
|
ORD229
|
ORD9216
|
ORD228VL
|
|
ADI产品系列 磁场传感器
|
器件
|
后缀
|
管脚
|
电压范围
(V)
|
工作电流
(mA)
|
Trise/Fall
(µS)
|
共模域
(µT)
|
差模域
(µT)
|
低速范围
(RPM)
|
高速范围
(RPM)
|
工作点精度
(mm)
|
说明
|
|
AD22151
|
YR
|
8
|
4.5~6
|
10
|
3
|
0~400
|
4~75
|
15
|
4000
|
0~3.5
|
可设置增益,线性输出
|
Infineon产品系列
|
型号
|
封装
|
电源电压(V)
|
方向精度
|
工作温度
|
类型
|
描述
|
|
GMR B6
|
6-SMD
|
+5~+7
|
180
|
-40~+150
|
磁场方向而非密度
|
惠斯通电桥全桥
|
|
GMR C6
|
6-SMD
|
+5~+7
|
360
|
-40~+150
|
磁场方向而非密度
|
两交叉半桥
|
Zetex产品系列
|
器件
|
封装
|
电源电压(V)
|
典型输出电压
(mV/V)
|
典型桥阻抗
(Ω)
|
灵敏度
(kA/m)
|
偏移电压(mV/V)
|
内部磁体
|
描述
|
|
ZMY20
|
SOT223S
|
12V
|
20
|
1.7
|
4.7
|
±1.0
|
否
|
输出电压与磁场强度成正比
|
|
ZMY20M
|
SOT223S
|
12V
|
18
|
1.7
|
5.5
|
±1.5
|
是
|
输出电压与磁场强度成正比
|
|
|

|
|