电源转换器在每个电子应用中都扮演着越来越重要的角色,机器人技术也不例外。如今,大多数电子设备都集成了在电压和电流水平方面具有不同功率要求的组件。这需要引入能够提供具有不同功率水平的多个输出电压的功率转换级。 过去,功率...
设计应用 时间:2023/2/1 阅读:1333
“自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系...
设计应用 时间:2021/11/1 阅读:990
基于TMS320F2812芯片实现移动机器人的导航和控制系统的应用方案
本文采用了无线射频识别技术、红外线距离传感技术和地磁感应电子罗盘相结合的方法,设计出了一种基于DSP控制的信息融合的自主移动的机器人的导航与控制系统。 并且在设...
技术方案 时间:2021/4/13 阅读:983
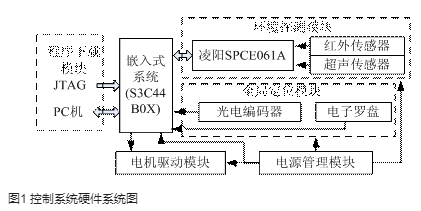
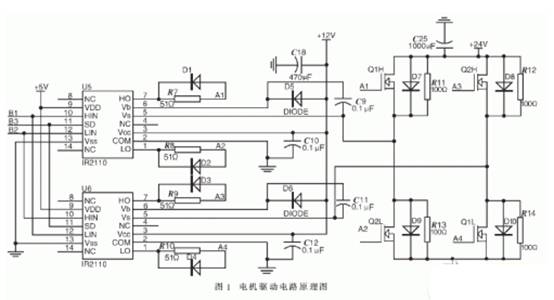
基于S3C44B0X芯片和SPCE061A单片机实现移动机器人的设计
1、引言 移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到...
设计应用 时间:2020/5/18 阅读:696
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了电视摄像机、三角测距仪、碰撞传感器、驱动...
技术方案 时间:2016/6/15 阅读:3844
随着科学技术的发展和社会的需要,移动机器人技术得到了迅速发展,正在渗透到各行各业中,使人们的生活更加便利。现今以单片机为的移动机器人存在处理数据量有限、控制系统...
技术方案 时间:2014/9/30 阅读:2527
引言 近年来随着人工智能技术、计算机技术等相关技术的发展,对移动机器人的研究越来越广泛。本设计是采用OpenWrt操作系统的移动机器人,它可实现多种不同功能,如探测险情、巡视、图像采集、定位、无线通信等。它还可以作为各种智能...
技术方案 时间:2013/1/17 阅读:3727
"对于移动机器人的开发来说,其大小,重量及性能都非常重要,因此坚固的模块化CompactRIO系统非常适合用于开发。 LabVIEW和NI硬件之间定义良好的兼容性显着地减少了开发者...
设计应用 时间:2012/8/21 阅读:4259
摘要: 针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列, 然后在分析二次成像法获取目标深度信息的缺陷的基础上, 提出了一种获取目标的空间位置和运动信息的...
技术方案 时间:2012/6/18 阅读:5197

摘要: 采用新型的超声波传感器,设计并开发基于ARM9 与嵌入式linux 为平台的轮式移动机器人平台的下的未知环境的避障导航系统。本文重点介绍该超声波传感器的实现原理以及...
技术方案 时间:2012/5/11 阅读:5511






