工业机器人末端执行器作为“作业执行终端”,其选型的场景适配性直接决定作业质量与生产效率。不同行业(汽车制造、电子装配、食品加工等)的工件特性、作业环境差异显著,通用型选型易导致工件损伤、作业效率低下等问题。本文聚焦多行业...
基础电子 时间:2025/12/23 阅读:861
工业机器人末端执行器(又称“手爪”)是机器人与工件直接交互的核心部件,直接决定作业精度、效率及适用场景,广泛应用于搬运、装配、焊接、喷涂等工业环节。现场应用中,常因选型与工件特性不匹配、安装调试不规范导致工件掉落、作业偏...
设计应用 时间:2025/12/23 阅读:1239
在工业自动化领域,机器需要传感器提供必要的信息,以正确执行相关的操作。机器人已经开始应用大量的传感器以提高适应能力。例如有很多的协作机器人集成了力矩传感器和摄像机,以确保在操作中拥有更好的视角,同时保证工作区域的安全等。...
基础电子 时间:2018/10/10 阅读:990
还记得机器猫吗?还记得变形金刚吗?想必每个小男孩都有一个机器人梦想,现在的机器人已经开始走进我们的日常生活,比如扫地机器人。机器人是由计算机控制的复杂机器,它具有类似人的肢体及感官功能;动作程序灵活;有一定程度的智能;在...
设计应用 时间:2017/8/24 阅读:4048
问:在什么情况下需要为进行备份? 答:1、新机器第一次上电后。 2、在做任何修改之前。 3、在完成修改之后。 4、如果机器人重要,定期1周一次。 5、最好在U盘也做备份。 6、太旧的备份定期删除,腾出硬盘空间。 问...
基础电子 时间:2017/8/7 阅读:3641
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业还可以根据人工智能技术制定的原则纲...
基础电子 时间:2017/8/7 阅读:809
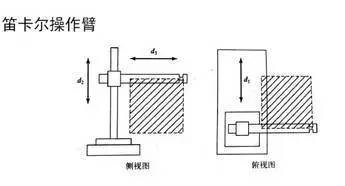
本文通过图文结合的方式,详细介绍了结构、驱动及技术指标各项内容。 一、常用运动学构形 1、笛卡尔操作臂 优点:很容易通过计算机控制实现,容易达到高。缺点:...
设计应用 时间:2017/7/24 阅读:909
一、常用运动学构形1、笛卡尔操作臂优点:很容易通过计算机控制实现,容易达到高。缺点:妨碍工作, 且占地面积大, 运动速度低, 密封性不好。①焊接、搬运、上下料、包装、...
设计应用 时间:2017/6/2 阅读:4007
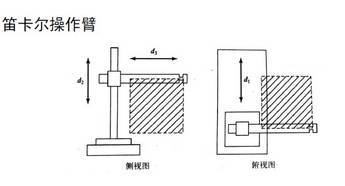
一、工业机构名词解释:1、关节(Joint):即运动副,允许机器人手臂各零件之间发生相对运动的机构。2、连杆(Link):机器人手臂上被相邻两关节分开的部分。3、刚度(Stif...
设计应用 时间:2017/4/12 阅读:2159
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。 对工业机器人关节驱动的电动机,要求有功...
设计应用 时间:2017/2/6 阅读:972






